
Page 22 - UOM理论知识
P. 22
6. 多旋翼民用无人驾驶航空器遥控器摇杆回中是指什么?
摇杆回中是指遥控器的摇杆处于中间位置,也叫中位。
7. 多旋翼民用无人驾驶航空器遥控器摇杆杆量是指什么?
摇杆杆量是指遥控器摇杆偏离摇杆中位的偏移量,杆量越大,偏移越多。
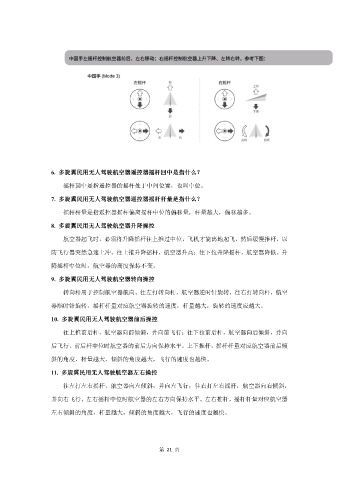
8. 多旋翼民用无人驾驶航空器升降操控
航空器起飞时,必须将升降摇杆往上推过中位,飞机才能离地起飞,然后缓慢推杆,以
防飞行器突然急速上冲。往上推升降摇杆,航空器升高;往下拉升降摇杆,航空器降低。升
降摇杆中位时,航空器的高度保持不变。
9. 多旋翼民用无人驾驶航空器转向操控
转向杆用于控制航空器航向。往左打转向杆,航空器逆时针旋转,往右打转向杆,航空
器顺时针旋转。摇杆杆量对应航空器旋转的速度,杆量越大,旋转的速度应越大。
10. 多旋翼民用无人驾驶航空器前后操控
往上推前后杆,航空器向前倾斜,并向前飞行;往下拉前后杆,航空器向后倾斜,并向
后飞行。前后杆中位时航空器的前后方向保持水平。上下推杆,摇杆杆量对应航空器前后倾
斜的角度,杆量越大,倾斜的角度越大,飞行的速度也越快。
11. 多旋翼民用无人驾驶航空器左右操控
往左打左右摇杆,航空器向左倾斜,并向左飞行;往右打左右摇杆,航空器向右倾斜,
并向右飞行。左右摇杆中位时航空器的左右方向保持水平。左右推杆,摇杆杆量对应航空器
左右倾斜的角度,杆量越大,倾斜的角度越大,飞行的速度也越快。
第 21 页